When you see a robot gliding across a room or exploring a maze, it might look effortless, but inside it is constantly thinking about where it is and what is around it. To move safely and intelligently, a robot needs to build a mental model of its environment. This is done through a process called mapping.
Understanding Robot Mapping
Robots do not have human-like vision. Instead, they rely on sensors such as cameras, ultrasonic rangefinders, or laser scanners (LiDAR) to measure distances and detect obstacles. The robot then combines these readings to build a map, much like how we might draw a floor plan after walking through a building.
This process, known as Simultaneous Localisation and Mapping (SLAM), allows the robot to build a map and figure out its own position on that map at the same time.
How Robots Store Maps in Memory
Once created, maps need to be stored so the robot can use them later. These maps can take several forms depending on how much detail the robot needs and how much memory it has. The three most common types are grid maps, topological maps, and feature maps.
Grid Maps
Grid maps are one of the most common ways for robots to store environments. Imagine laying graph paper over the world. Each tiny square, or cell, represents a small patch of space.
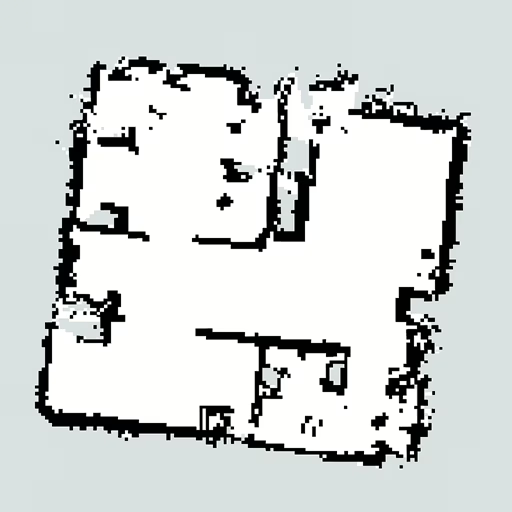
- If the cell contains an obstacle, such as a wall or chair, it is marked as occupied.
- If it is empty, it is marked as free.
- Areas the robot has not yet seen are marked as unknown.
This type of map is called an occupancy grid. Robots can easily use it to plan paths, much like finding the shortest route across a chessboard without hitting the blocked squares. However, grid maps can be memory-intensive if the area is large, since every little cell needs to be stored.
Topological Maps
A topological map is more like a network diagram than a floor plan. Instead of storing every inch of space, the robot records key locations called nodes and the connections between them, known as edges.
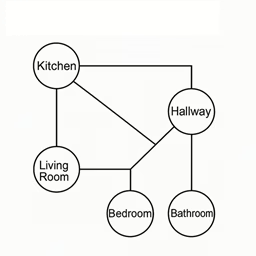
For example, one node might be “kitchen doorway” and another “living room center.” If there is a clear path between them, the robot connects those nodes with an edge.
Topological maps are more memory-efficient and easier for higher-level navigation, such as telling the robot to go from the kitchen to the hallway, without worrying about every tiny movement along the way.
3. Feature Maps
Feature maps focus on recognizable landmarks rather than full layouts. The robot records features such as corners, door frames, or pieces of furniture, and notes their positions relative to each other.
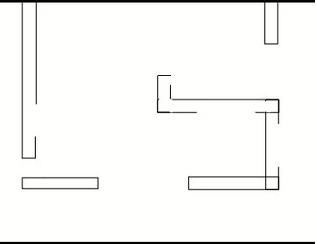
These are useful when the robot’s sensors can detect distinct visual or geometric patterns. For example, a robot might remember that there is a table edge two meters left of the window and use that to reorient itself later.
Feature maps are often used in vision-based robots or mobile devices that rely on cameras rather than precise distance sensors.
Navigating with Rules and Algorithms
Once a robot has a map, or is exploring without one, it needs a way to decide how to move. This is where path-planning algorithms and navigation rules come in.
Path-Planning Algorithms
Path-planning algorithms help robots find efficient routes from one point to another while avoiding obstacles.
Two common ones are:
- Dijkstra’s Algorithm: This explores every possible route to find the absolute shortest path. It is reliable but can be slow for large maps.
- A-Star (A*): A smarter version of Dijkstra’s algorithm. It estimates how far the goal is and focuses on promising routes first, making it much faster.
These algorithms work especially well with grid maps, where each cell represents a potential step. The robot marks which cells are safe and which are blocked, then calculates the best route across the map.
Navigation Rules
In simpler cases, such as maze-solving robots, navigation can rely on simple rules instead of complex maps.
One well-known example is the Left-Hand Rule. The robot keeps one side, its “hand” or sensor, in constant contact with a wall and follows it until it finds an exit. This works for simply connected mazes, where all walls are linked, and is often used in competitions or educational projects because it requires little memory or computation.
Other rule-based techniques include:
- Wall-following, similar to the left- or right-hand rule but used continuously for obstacle avoidance.
- Random walk, where the robot moves randomly until an open path is found, useful for exploration in unknown areas.
- Follow-the-line, used in line-tracking robots that follow a marked path on the floor.
In Summary
Robots understand their surroundings through different types of maps:
- Grid maps for precision,
- Topological maps for efficiency
- Feature maps for recognizing landmarks.
They then use algorithms or simple rules to move safely and reach their goals. Together, mapping and navigation form the brain and instincts of a robot, helping it think, plan, and explore the world intelligently.