This section aims to provide a beginners guide to motors. If you’ve ever wondered how robots move, how conveyor belts keep turning, or how tiny electronic toys spring into life, motors are the hidden heroes doing the hard work. This page gives you the big picture in simple language, so you can understand the main types of motors before diving into more detailed articles later.
Motors may look complicated, but at heart they all do the same thing: they turn electrical energy into movement. The way each motor creates that movement varies, and those variations are what make some motors great for constant speed, some perfect for precision, and others ideal for fast, responsive motion.
What motors actually do
All motors rely on magnetic fields interacting with coils of wire. When electricity flows through a coil, it creates a magnetic field, and when that field pushes or pulls against another magnet, you get rotation. The rotating part is called the rotor, and the still part around it is the stator. Changing how the fields are created, controlled and timed gives us all the different motor types you’ll come across in robotics and engineering.
AC motors

AC motors run from alternating current, which means the electrical supply is constantly changing direction. That changing current naturally creates a rotating magnetic field in the stator, and this makes the rotor follow along. AC motors are often used when you want simple, steady motion without complex controls. They are robust, low-maintenance and happy to run continuously.
A common version is the induction motor, which uses a clever effect called electromagnetic induction to make the rotor spin. These motors are brilliant for applications where you don’t need pinpoint accuracy but do need smooth, reliable operation. Later guides can explore types such as induction motors, reversible motors, torque motors and synchronous motors in more depth.
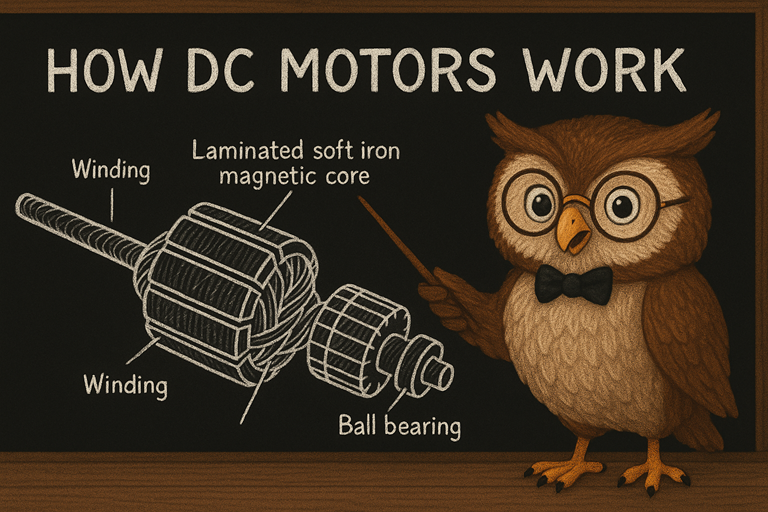
DC motors

DC motors run from direct current, like the power from batteries. They tend to be smaller and more efficient than AC motors, especially in robotics and hobby projects. There are two major flavours: brushed and brushless. Brushed motors use carbon brushes to physically switch the current in the rotor. They’re simple, cheap and great for beginners, though the brushes eventually wear out.
Brushless motors take a more modern approach. Instead of brushes, they use sensors and electronics to control the timing of the magnetic fields. That makes them quieter, longer-lasting and more powerful for their size. Brushless motors appear in drones, electric bikes, conveyor systems and many types of robots.

Because brushless motors need a separate driver to run, they offer far more precise speed control than brushed motors. This is why you see them in applications where efficiency and responsiveness really matter.
Geared motors

Many DC motors spin too fast to be useful on their own, which is where gearboxes come in. A geared motor combines a DC motor with a set of gears that slow the output speed and boost the torque. This makes a small motor strong enough to move a robot, turn a wheel or lift a mechanism.
The size of the gears changes how fast the motor turns and how much force it can provide. Later guides will explore how gear ratios work and how to choose them for your project.
Stepper motors
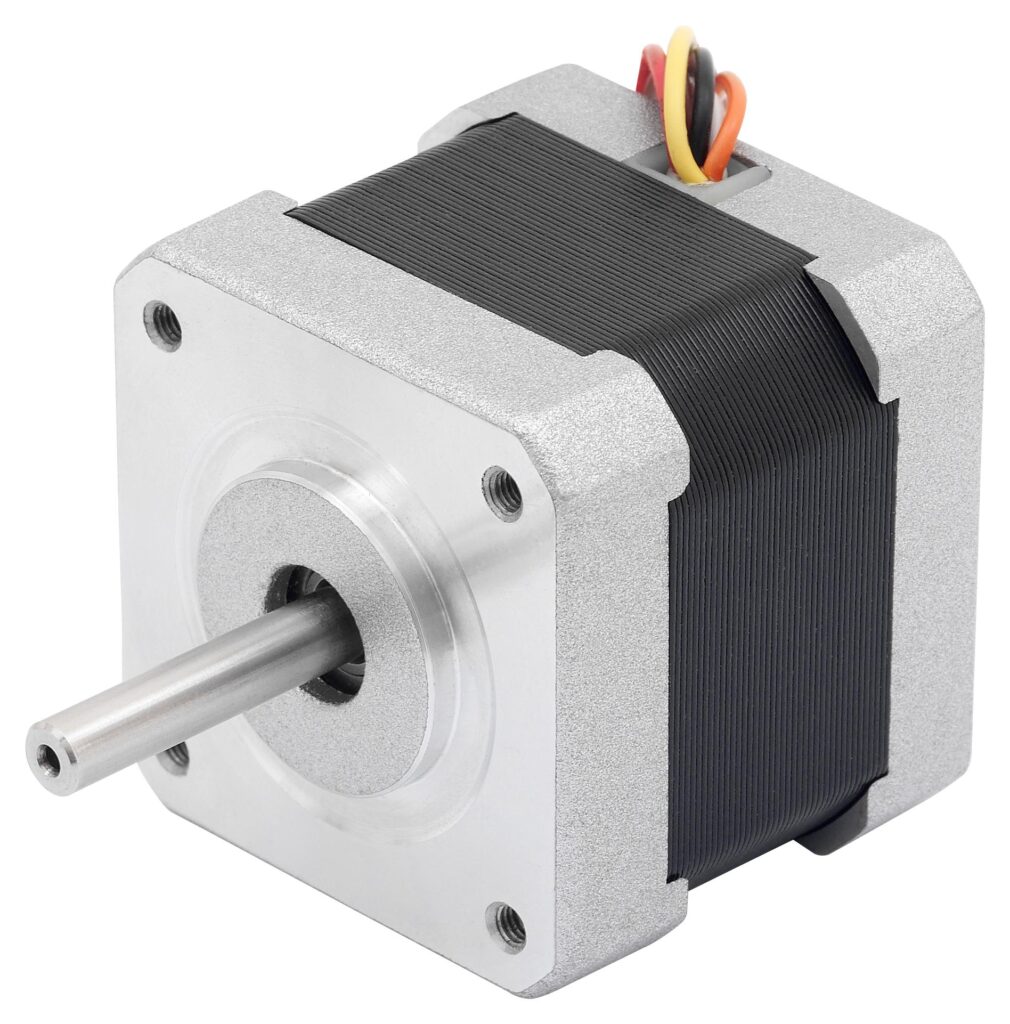
Stepper motors are perfect when you want accurate, repeatable movement. Instead of spinning continuously, they move in tiny steps. You control those steps by sending timed pulses from a driver. That means you can tell a stepper to move exactly a certain amount and it will hold its place until told otherwise.
This makes steppers ideal for 3D printers, CNC machines, camera sliders and anything needing precise positioning. Because they use many small magnetic “teeth,” they react quickly and predictably to each command. Future guides can go deeper into unipolar and bipolar steppers, microstepping and speed control.
Servo motors

Servo motors are brilliant for controlled angles. They don’t just spin freely—they rotate to a target position and stop themselves there. Inside a servo you’ll find a DC motor, a gearbox and a tiny feedback circuit that constantly checks where the output shaft actually is.
When you send a control signal, the servo compares the target angle with its current angle and adjusts until they match. That’s how servo motors steer RC cars, move robotic grippers and position camera mounts with such accuracy. Later articles can break down servo pulses, ranges and continuous-rotation versions.
Motor controllers
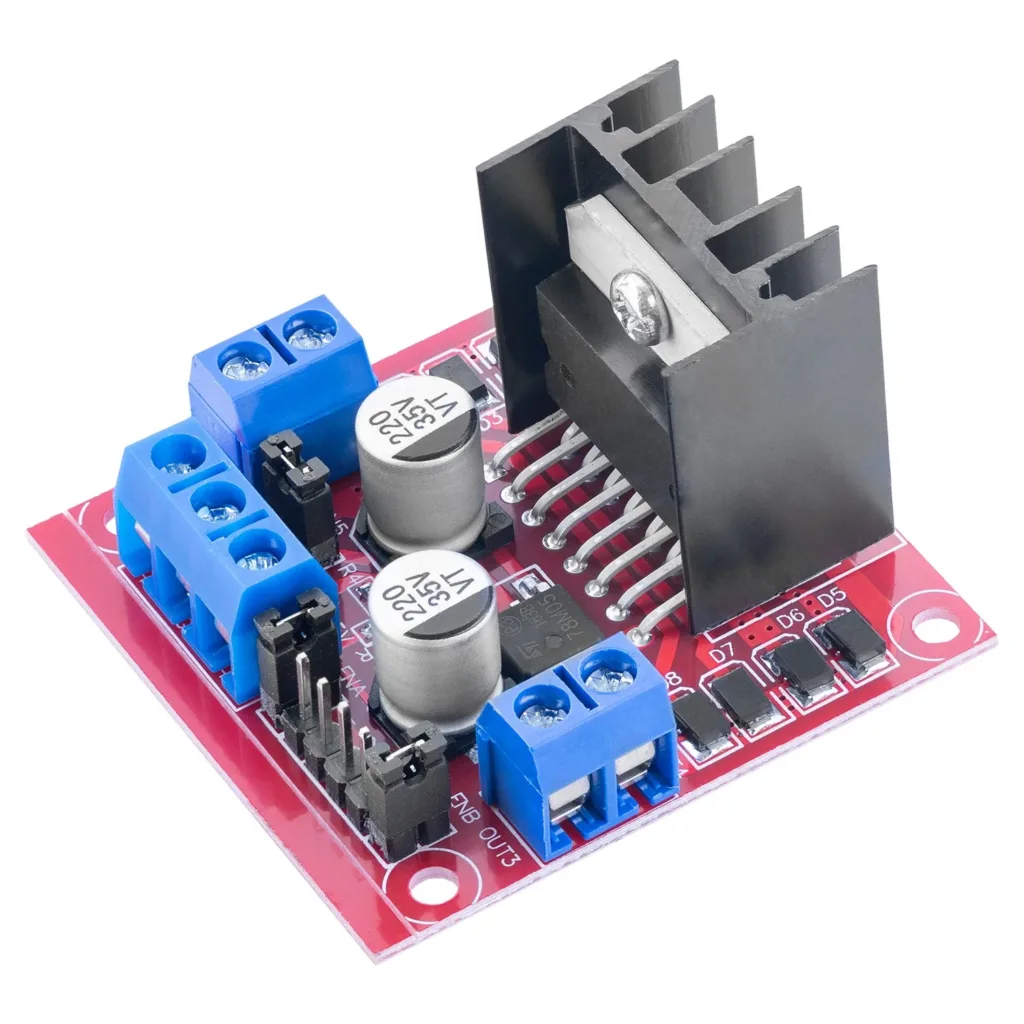
A motor controller is the bridge between your microcontroller and your motor. Microcontrollers can’t supply enough power to run motors directly, and motors generate electrical noise that could damage the electronics. A motor controller takes care of this by delivering the right voltage and current while listening to your control signals.
Different motors need different controllers. Brushed motors use simple driver circuits or H-bridges. Brushless motors rely on dedicated drivers or Electronic Speed Controllers (ESC) to handle the timing of the magnetic fields. Stepper motors need drivers that energise coils in precise patterns. Servos contain their own controller, so you just send them a pulse and they do the rest.
This page introduces the idea, but later guides will explain how controllers work and how to choose them safely.
Choosing the right motor
Choosing a motor is really about balancing speed, strength and accuracy. A motor that spins incredibly fast might not have enough torque to move your robot. A motor that is extremely strong might be too slow for the motion you want. And a motor that holds position perfectly might not be ideal for continuous rotation.
As a starting point for beginners:
- AC motors shine when you want continuous, steady rotation.
- Brushed DC motors are simple, cheap and great for small projects.
- Brushless motors are efficient and reliable for high-performance tasks.
- Geared motors give you extra torque at lower speeds.
- Steppers excel at precise movement.
- Servos excel at controlled angles.
Later pages in this series can help you calculate torque, understand speed-torque curves and match motors to specific jobs like conveyor belts, robot drive systems or XYZ tables.