
From stabilising drones in mid air to making sure your smartphone knows when it has been turned sideways, a small but powerful device is at work behind the scenes. That device is known as an Inertial Measurement Unit, more commonly shortened to IMU.
Understanding what an IMU is and how it works helps explain how modern machines sense motion and orientation without relying on cameras, GPS signals, or external references.
What is an IMU and why is it important
So, what is an IMU? An IMU is an electronic device designed to measure motion. It does this by detecting how an object accelerates and how it rotates as it moves through space.
IMUs are used anywhere a system needs to know its orientation or movement. That includes robots, industrial machines, vehicles, aircraft, drones, virtual reality headsets, smartphones, and even medical and prosthetic devices. Without IMUs, many of these technologies would struggle to remain stable, accurate, or responsive.
What sensors are inside an IMU
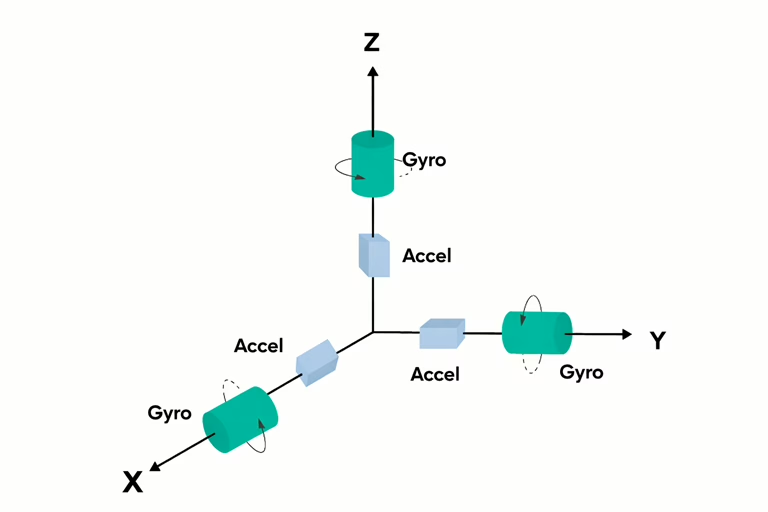
An IMU typically contains multiple motion sensors arranged across three axes, often described as X, Y and Z.
Accelerometers measure linear acceleration along each axis. In simple terms, they detect changes in speed and direction. Gyroscopes measure rotational rate, showing how fast the device is turning around each axis.
Some IMUs also include a magnetometer. This sensor measures the Earth’s magnetic field and helps determine heading relative to magnetic north. When included, it allows the system to correct long term drift in orientation.
How an IMU works
To understand what an IMU does, it helps to look at how its sensors operate.
In most modern devices, accelerometers and gyroscopes are built using MEMS technology. These sensors contain microscopic structures etched into silicon. In an accelerometer, a tiny mass moves slightly when the device accelerates. That movement changes an electrical signal, which is converted into an acceleration measurement.
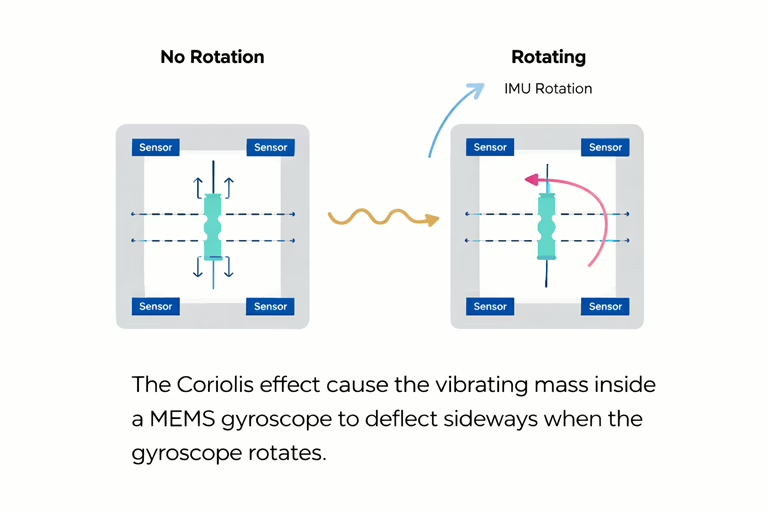
Gyroscopes often rely on something called the Coriolis effect. Inside the sensor, a very small structure is made to vibrate in a controlled way, a bit like a tiny tuning fork. When the device is not rotating, this vibration stays steady and predictable.
When the IMU starts to rotate, the vibration is gently pushed sideways. This sideways movement happens because of the Coriolis effect and only appears when rotation is taking place. The faster the device turns, the more the vibration is pushed off course.
The gyroscope measures this tiny sideways movement using electrical signals. From this, it can work out how fast the device is rotating and which direction it is turning. This information is then sent to the rest of the system to help it understand changes in orientation.
Together, these measurements allow the IMU to detect motion in three dimensional space.
What data an IMU produces
The direct output from an IMU is raw sensor data. This includes acceleration values and rotational rates for each axis. On their own, these values describe movement but not absolute position.
Most systems process IMU data further. Software combines and filters the measurements to calculate orientation, commonly described as roll, pitch and yaw. More advanced systems integrate the data over time to estimate velocity and position using a method known as dead reckoning.
Why calibration and processing matter
IMUs are extremely sensitive, which makes calibration essential. Accelerometers measure gravity as well as movement, so systems must account for the constant pull of the Earth. Temperature changes and vibration can also affect accuracy.
Without correction, small errors build up over time, leading to drift. This is why many systems combine IMU data with other sensors, such as GPS, to maintain reliable performance.
