This has been another one of those months where I feel like I have achieved very little… but then I sit down to write one of these updates and suddenly realise quite a lot has actually happened.
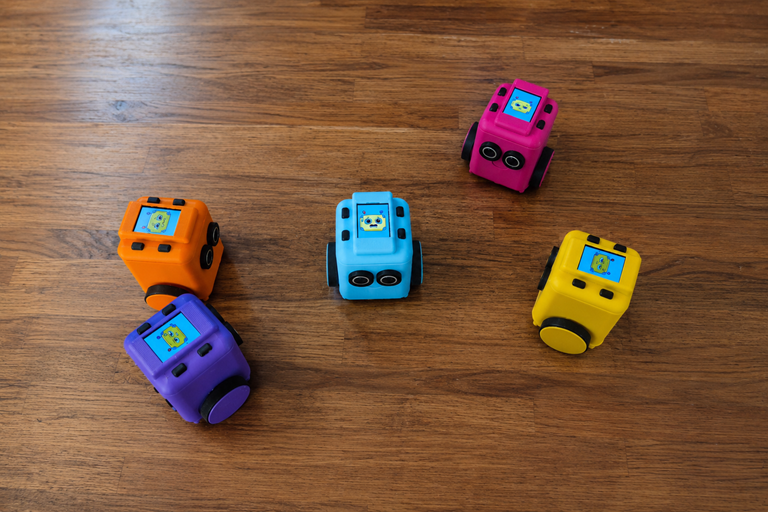
The biggest milestone is that I now have five fully working Tinkibots running with the larger display on top. Seeing them all together properly working feels like a huge step forward.
I still have not managed to add the power button yet, but the battery charging is now working really well. My blue robot had been switched off for quite a long time and the battery was very low, so it ended up becoming a surprisingly useful test. Thankfully it charged perfectly in about an hour, which feels fairly reasonable for the current setup.
Internally, the robots can now measure charging current, so I could actually see it getting a good old charge. I still need to add a proper battery gauge during charging, but for now a simple charging image is doing the job nicely.
I definitely need to revisit the PCB and wiring design at some point. The wiring itself works well, but it is quite fiddly to manufacture consistently and reliably. I think I am getting close to the point where I just need to bite the bullet and design my own PCB with everything integrated onto it.
The good news is that the ESP32 Devkit schematics are available, and JLCPCB appear to stock the parts I need, so it is starting to feel much more achievable than it did a few months ago.
In the meantime, I will probably build some sort of test harness to verify the integrity of each cable before assembly. Future Terri will probably appreciate that decision.
From a software point of view, things are also becoming much more structured. Configuration is now persisted properly, which was important because every robot behaves slightly differently. Even though they are built from the same design, each one has its own little quirks that can cause them to misbehave if they all use exactly the same settings.
There is now a calibration process that tunes the PID values for each robot individually to improve performance. I do not think it is perfect yet, and the robots still overshoot slightly more than I would like, but it definitely feels like a step in the right direction.
I have also modified the proxy software used to communicate with the Tinkibots so that multiple robots can now be connected simultaneously. Each robot is assigned a unique ID when powered on for the first time, and rather than referring to them using long strings of random Bluetooth characters, they now also have nicknames such as Pink, Yellow and Blue.
The proxy can now trigger music playback and run predefined scripts across the robots. To make them behave predictably, I have had to add synchronisation commands that allow scripts to wait until all robots have completed what they are doing before moving onto the next action.
While trying to get the robots dancing in a way that did not resemble “dad dancing”, it became clear that I will eventually need some form of global heartbeat that all commands execute against. The biggest issue is not actually delays themselves, but the fact that Bluetooth polling across the robots is not synchronised, which causes movements to drift apart over time.
I do have an idea for how to solve this. I just need the time to implement it.
I also managed to create a small scene involving all five robots where the middle robot farted.
Was this mature?
Absolutely not.
Was it a useful technical exercise involving synchronisation, scripting and audio triggering?
Surprisingly yes.
In my defence, I did grow up watching Rik Mayall, so perhaps this outcome was inevitable.
Over the next few weeks I am hoping to slow development down slightly and spend more time talking to people. I now have email addresses for several more teachers and an invitation to visit a school that I really need to follow up on before too much time passes.
I am also hoping to speak with University of Plymouth to see what support might be available as Tinkimo develops further.
In June I will also be taking part in a fireside chat with Digital Plymouth where I will be talking a bit about myself, Tinkimo and the experience of taking part in the Rocket Duck Launchpad programme.
So yes… another busy month ahead.
Terri