It has been a little while since my last update, and quite a few things have changed behind the scenes.
Unfortunately I had to slow down for a bit and take some time off work due to some health issues. Just a gentle reminder that I am human and not a machine. Sometimes even the people building robots need to pause and recharge. Note to self. Slow down Terri.
Despite that, progress has still been happening.
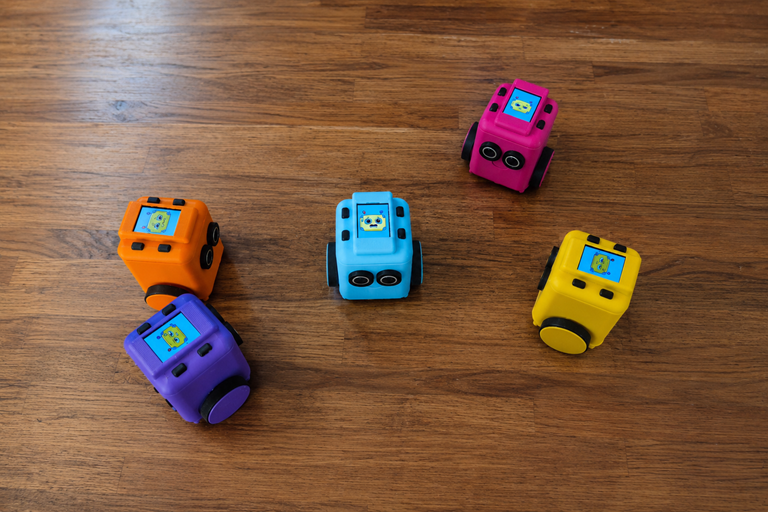
One of the biggest changes is that I have moved the robot from using a Raspberry Pi Pico to an ESP32 microcontroller. This opens up quite a few interesting possibilities. I have also managed to get the audio working properly, which means the robot can now play MP3 files. Even more fun, it can also play different musical instruments. I am already imagining a future Tinkibot flash mob where a group of robots perform together.
Another important change was the power system. I moved away from using a single LiPo cell and switched to a two cell setup. This should provide a more reliable and stable power solution. To support this, I modified the charging circuitry and added a coulomb counter so the robot can estimate things like how long it will take to charge or how long the battery will last during use.
After speaking with a few schools, it also became clear that extensibility would be really important. Teachers and students will want to experiment and add new ideas over time. To support that, I added an I2C connection with a 5V supply on both the top and bottom of the robot so additional modules can easily be connected.
The USB C connection has also been redesigned. Users will be able to connect to the robot not just for charging, but also to upload their own custom code for controlling modules. Importantly, this connection is separate from the one used to update the core firmware. That helps keep the base system safe while still allowing lots of creativity and experimentation.
Probably the most exciting step so far is that I have sent off the PCBs for version two of the robot to be manufactured. With a bit of luck they should arrive in about a week. Once they do, I can start assembling them and testing how everything works together. The new design should also make the robots much easier to manufacture, which will really help when it comes to running pilot programmes.
And finally, this weekend I will be heading to the Rocket Duck event to meet other founders and talk about the next steps from a business perspective. It is a bit nerve wracking but also very exciting.
More updates soon.
Terri