Robots would not get far without sensors. Just as humans rely on sight, hearing, and touch, robots need sensors to understand the world and act safely within it. Without them, a robot would simply follow instructions blindly, unable to adjust when something unexpected happens.
This guide introduces the main types of sensors used in robotics, explains how they work, and explores where they are heading in the future.
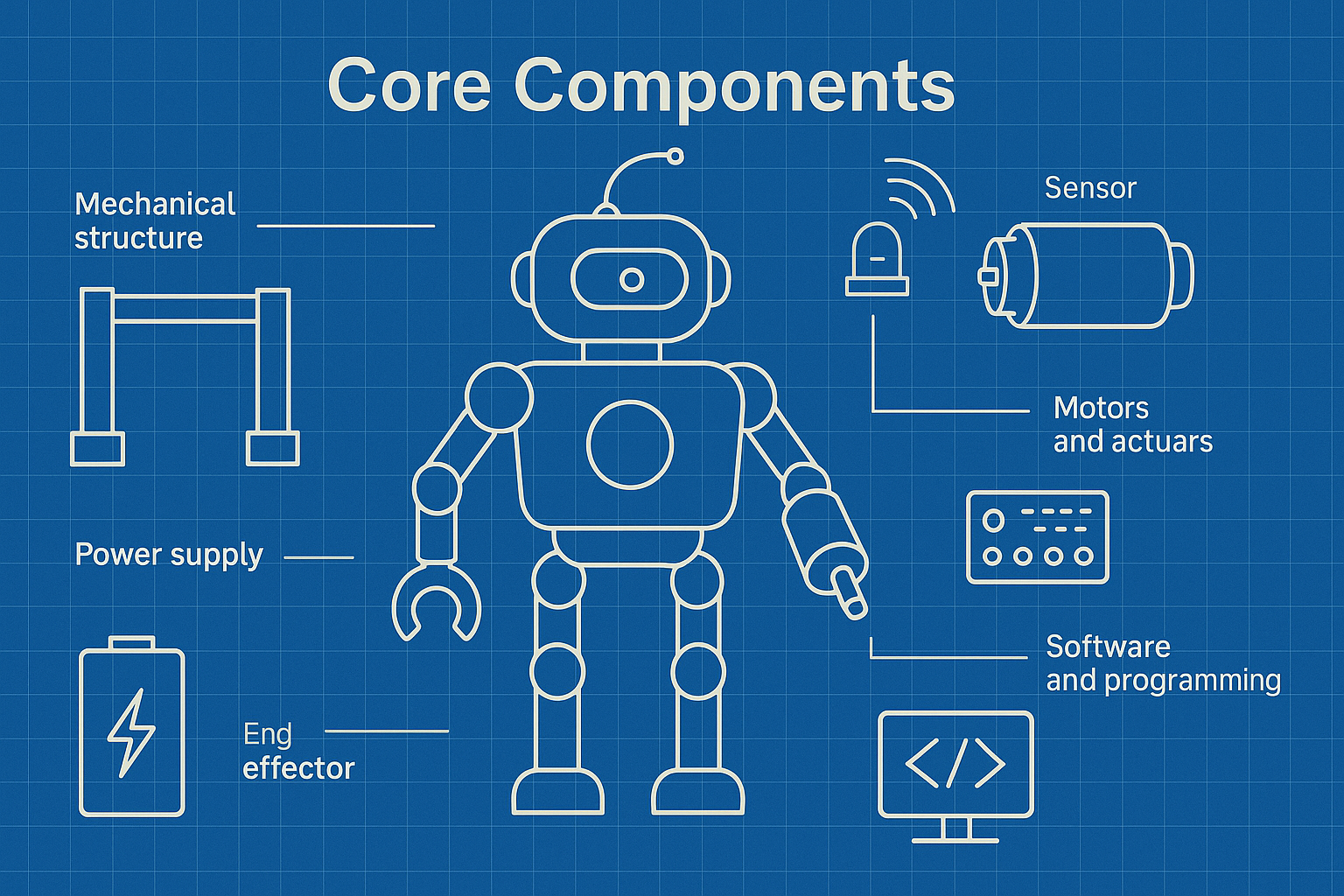
Internal and External Sensors
Robotic sensors fall into two groups. Internal sensors monitor what’s happening inside the robot, such as wheel rotations, motor torque, or temperature. External sensors gather information about the outside world, from detecting obstacles to recognising objects.
A robot arm, for example, might use encoders (internal) to track its joint angles while relying on a camera (external) to identify the object it needs to pick up.
Motion and Position

Encoders act like a robot’s odometer. They measure how far a wheel or joint has turned, often using a slotted disk and light beam to count pulses. This makes them essential in robotic arms and mobile robots, where precise positioning matters.
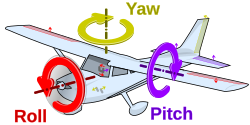
Inertial Measurement Units (IMUs) give robots balance and orientation. They combine accelerometers (measuring acceleration), gyroscopes (measuring rotation), and sometimes magnetometers (measuring heading). Drones, for example, use IMUs to stay level in flight. However, IMUs can drift over time, so they are often paired with GPS or cameras.
Proximity and Range
Ultrasonic sensors work like bats using echolocation. They emit high-pitched sound and time how long it takes to bounce back. They are inexpensive and common in robot vacuums, though soft or angled surfaces can fool them.
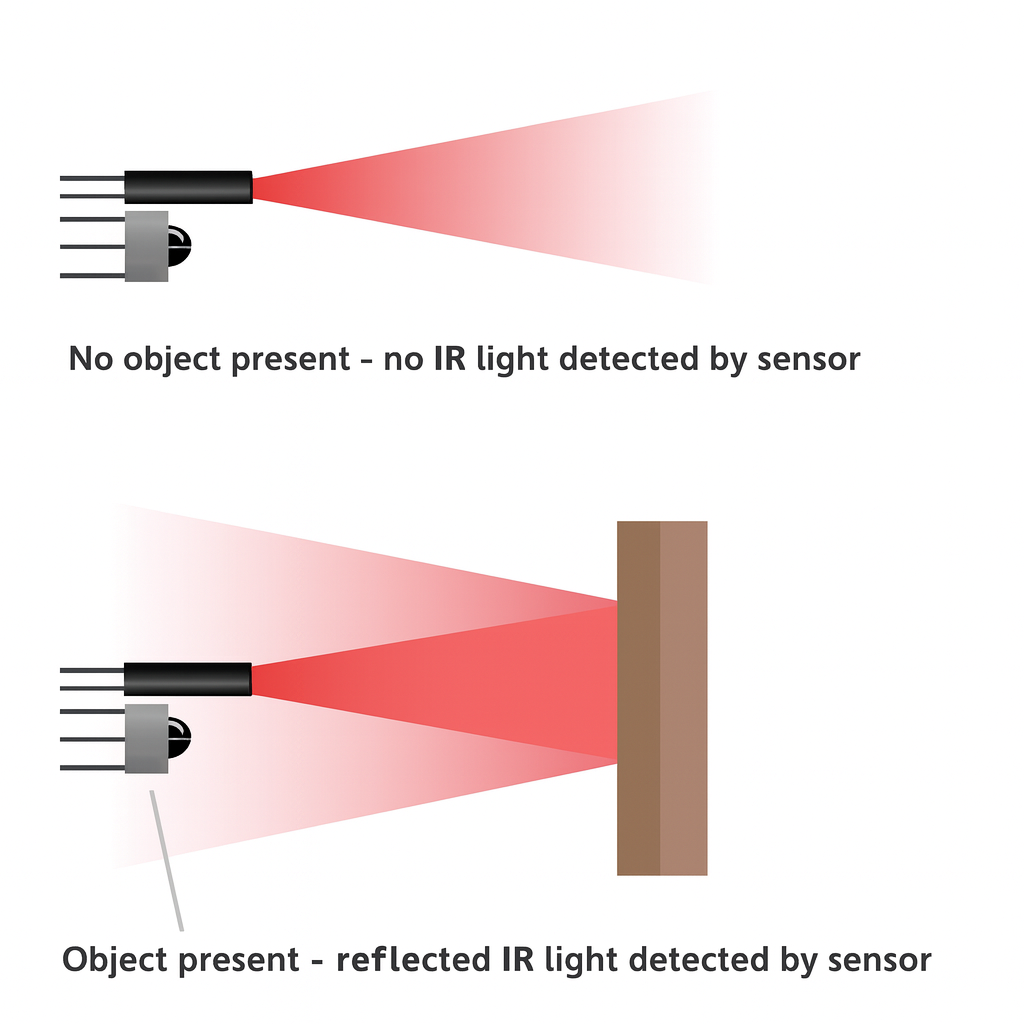
Infrared sensors use invisible light to detect nearby objects. They are quick and low-cost but easily confused by bright sunlight or reflective surfaces.
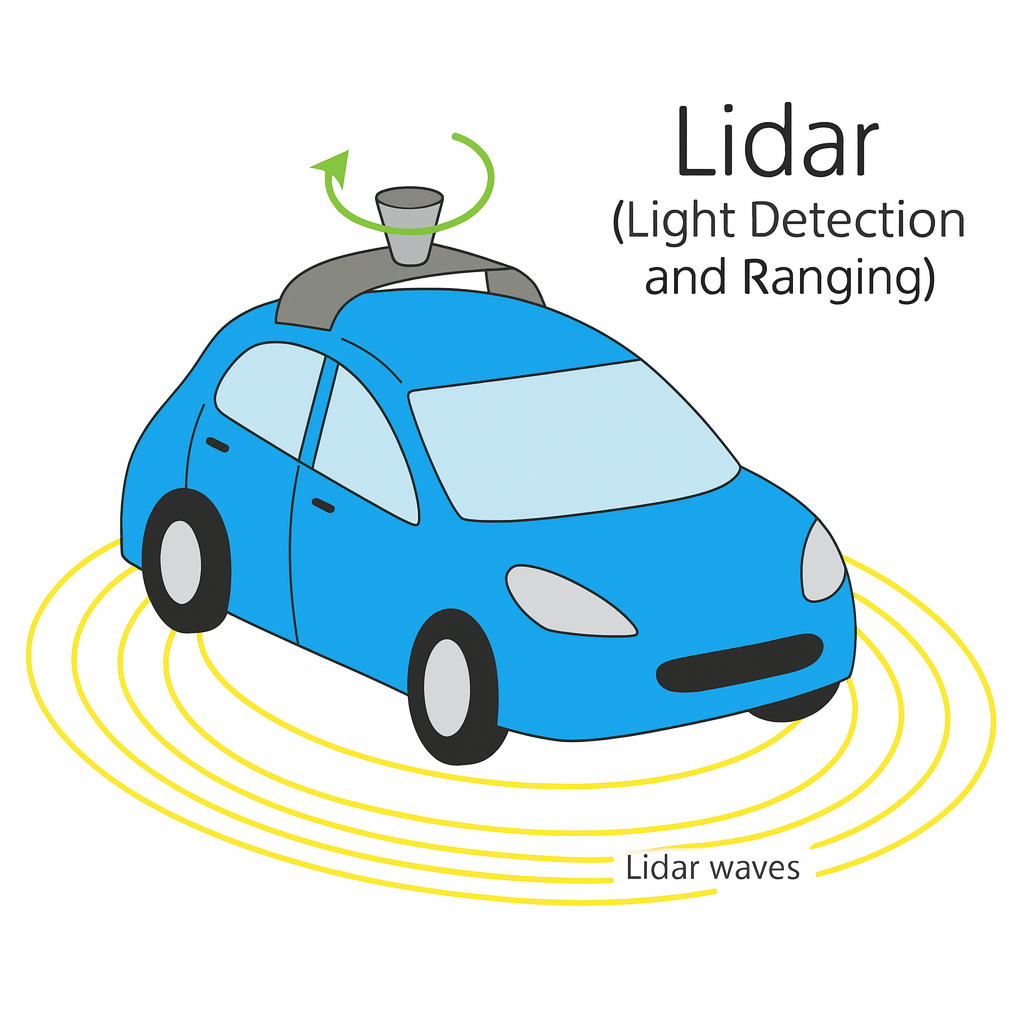
LiDAR (Light Detection and Ranging) uses lasers to scan surroundings and build 3D maps. It offers great accuracy, powering autonomous cars and warehouse robots. However, LiDAR is more expensive and can be affected by rain or fog.
Vision and Imaging
Standard cameras (RGB) provide colour images but require computer vision software to interpret them. Stereo cameras mimic human eyes, capturing depth by comparing two images. Depth cameras go further, projecting patterns of light or measuring time-of-flight to create 3D maps.
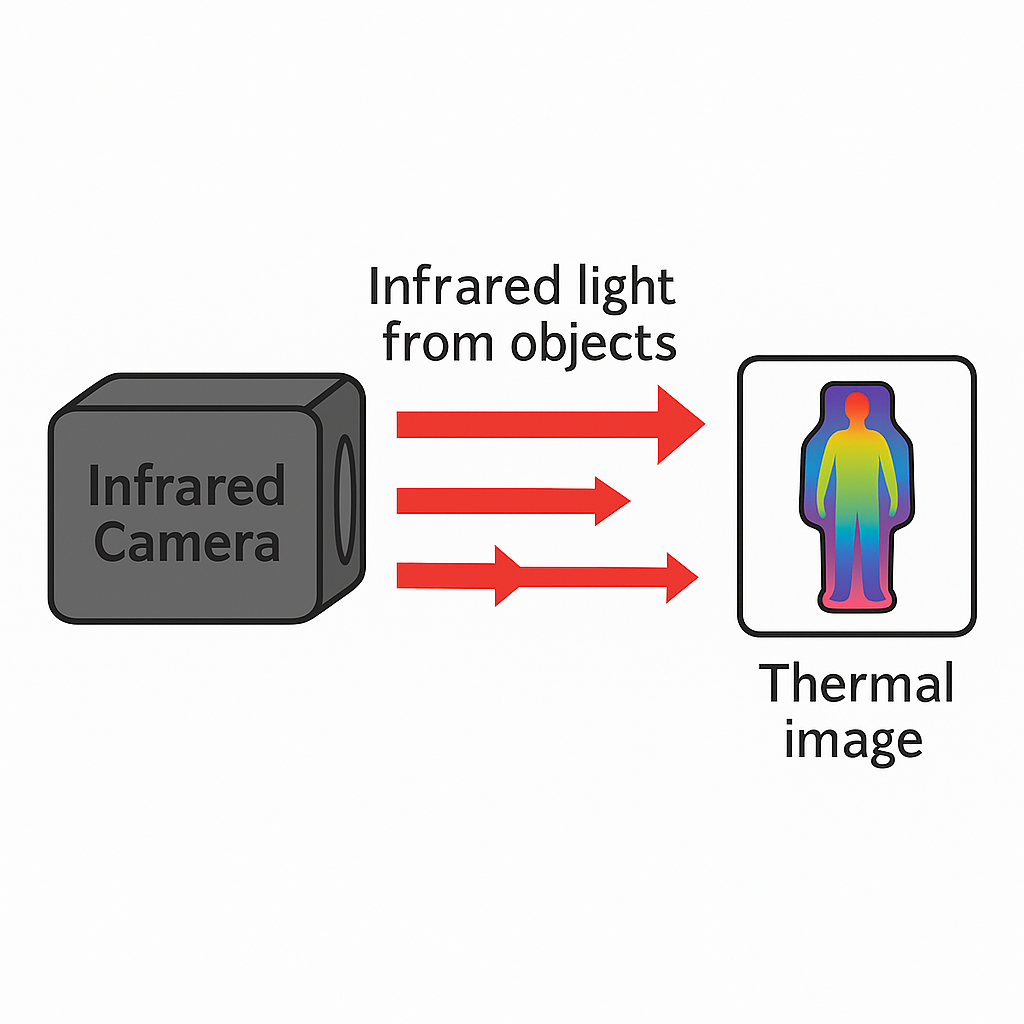
Thermal cameras detect heat rather than light, allowing robots to find humans in darkness or spot overheating machinery.
Touch and Force
Force and torque sensors measure how much push or twist a robot applies. They are often mounted on robot wrists or grippers to help handle objects safely, ensuring the robot applies enough pressure without causing damage.
Tactile sensors act like a robot’s skin. They detect touch, pressure, or texture using resistive, capacitive, or piezoelectric methods. More advanced systems use artificial skin with arrays of sensors, giving robots finer awareness of contact and slip.
Environmental Monitoring
Robots often need to sense their environment as well as objects. Temperature sensors help manage batteries or industrial processes. Humidity and pressure sensors support agriculture and drones. Gas sensors detect hazards such as smoke or carbon monoxide. Magnetometers measure magnetic fields, sometimes used to follow buried boundary wires in robotic lawnmowers.
Combining Sensors
No single sensor is perfect. Cameras need light, IMUs drift, ultrasonics miss soft objects, and LiDAR is costly. That is why most robots use sensor fusion, combining data from multiple sensors to build a clearer picture.
For example, drones fuse IMU and GPS data to stay stable, while warehouse robots combine LiDAR with wheel encoders for smooth navigation. Collaborative robots use both force sensors and vision to work safely alongside humans.
The Future of Robotic Sensing
Sensors are rapidly improving. Solid-state LiDAR is becoming smaller and cheaper. Flexible electronic skins are being developed to give robots touch across their entire body. Event cameras, which detect changes in brightness instead of capturing full frames, promise faster reactions with less data. Chemical sensors may one day allow robots to smell, while on-board AI will process sensor data instantly without relying on cloud computing.
Final Thoughts
Sensors are what make robots intelligent and adaptable. They give machines the ability to see, hear, feel, and measure their surroundings. For beginners, the best way to learn is through experimentation. Start simple, with ultrasonic or infrared sensors on a small robot, and then build towards more advanced systems like cameras or LiDAR.
Robots may not yet sense the world as well as humans, but with every new development, they are getting closer — and in some areas, already ahead.